输入信号
车身静态信号输入主要包含:
车身安装位置及角度/雷达安装极性
车身动态信号输入主要包含:
车速/轮速/档位/横摆角/方向盘转角
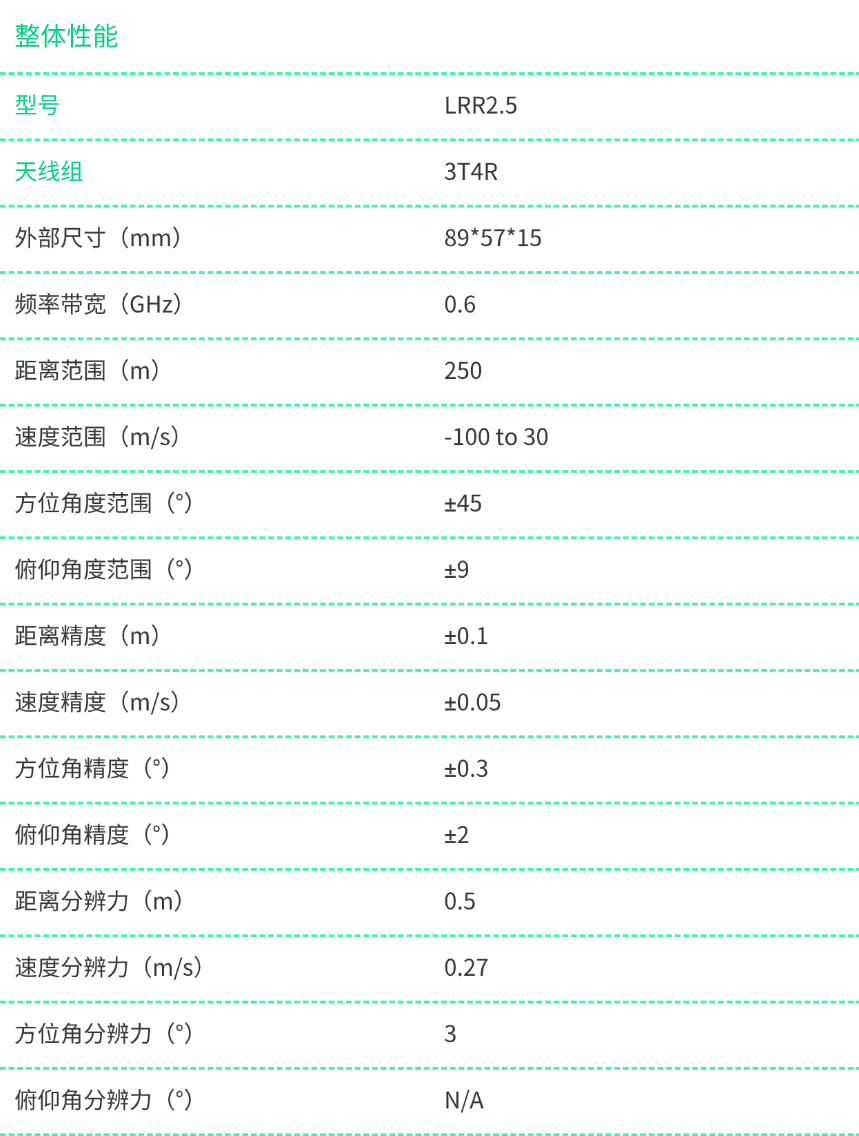
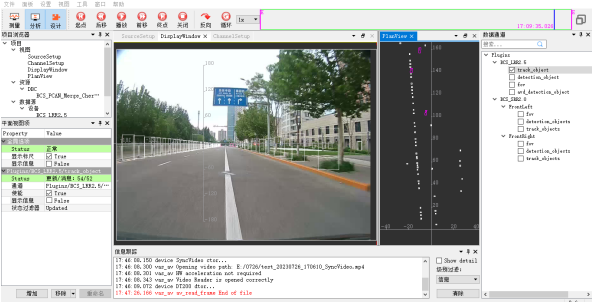
输出信号
雷达输出点云 (detection) 的坐标系是以雷达自身为原点的极坐标系,主要包含以下信息:
点云的径向距离值;
点云的径向相对速度值;
点云的强度(有效截面积)值;
点云的水平角度值;
点云的垂直角度值;
点云的置信度状态。
雷达输出航迹 (Object) 的坐标系是以整车前保险杠中心点为原点的直角坐标系,主要包 含以下信息:
航迹的 ID 值;
航迹的状态:新建、成熟、滑行
航迹的横纵向坐标值;
航迹的横纵向相对速度值;
航迹的横纵向相对加速度;
航迹的长、宽值;
航迹的置信度状态 。